GRIPPLANNING System
AWARD-WINNING software package for automated position calculation and calculation of grip points for manipulation tasks using robots. (Handling Award 2016)
The problem solver and its areas of application:
Teach-in of freely positioned, complex or organically shaped components with a large variety of objects for automated pick & place applications. Can also be used for simple parts with a high variety of types.
This might also interest you:
- No manual pre-orientation and alignment of the components necessary
- Automatic teach-in process massively reduces the time required and manual errors
- “Teaching” of any 3D data sets for a wide range of applications
- Robot-calibratable gripper tool for small components (offset suction cup)
- Can be flexibly adapted to customer-specific gripper geometries
Features
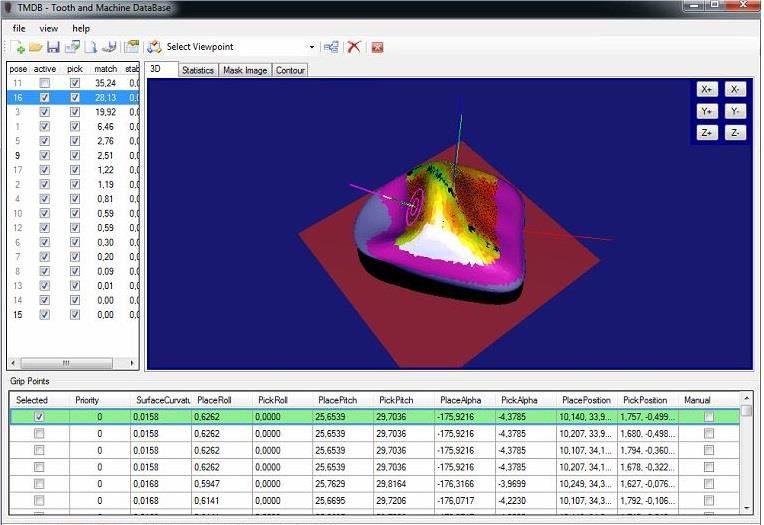
Fully automatic pre-calculation of possible stable positions with handle positions based on CAD geometry
Manual optimization possible if required by selecting alternative handle positions
Statistics on position, probability of occurrence and pick & place quality returned from the Pick & place systems
REFERENCE PROJECT
TMM© – Tooth Mounting Machine
(European patent No 2925254 and Brazilian patent NoBR 11 2015 012500 0)
Manipulation of denture teeth
Hundreds of differently shaped tooth models with a large number of stable layers are placed in the correct position in a counter mold with a cycle time of up to less than 2 seconds.
We are ready for your project!
Even if you don’t produce any teeth!
Which complex challenge can we realize for you with the software license for Gripplanning ?
Contact Harald Unterrainer right away.
This might also interest you:

Frequently asked questions (FAQs)
Gripplanning – was ist das und wie wird es eingesetzt?
Systems for detecting the position of parts in robot systems are essential for automating processes.
Gripplanning is a system for automated position calculation and calculation of grip points for manipulation tasks using robots. No manual pre-orientation and alignment of the components is necessary. An automatic teach-in process massively reduces the time required and manual errors.
Funktioniert Gripplanning bei großer Teilevielfalt mit komplex-/organisch-/frei-geformten Teilen?
Yes, if there is a very high component variety of complex/organic/free-formed parts in your production, “manual teaching” is often not efficient. We have the right automation solution in the Pick & Place area for you, with which you can automatically teach-in parts, sort them and move them with Pick & Place. The WESTCAMGripplanning© software supports these processes.
Ihr Unternehmen hat bereits Greifroboter im Einsatz – Sie möchten sich über die Vorteile von Gripplanning informieren?
Anytime with pleasure! We are at your disposal for a free consultation. Contact us right away. We look forward to seeing you!
