 Návrh a výroba produktu
Návrh a výroba produktu
 3D Tisk
3D Tisk
 CAM
CAM
 3D Messtechnik
3D Messtechnik
 PDM, MES
PDM, MES
 Architektura astavebnictví
Architektura astavebnictví
 Mechatronika & Robotika
Mechatronika & Robotika
 Řešení pro zobrazování
Řešení pro zobrazování
 Hardware
Hardware
 Návrh a výroba produktu
Návrh a výroba produktu
GRIPPLANNING System
PREISGEKRÖNTES Softwarepaket zur automatisierten Lageberechnung und Berechnung von Griffpunkten für Manipulationsaufgaben mittels Roboter. (Handling Award 2016)
Der Problemlöser und seine Anwendungsgebiete:
Einlernen von frei positionierten, komplex bzw. organisch geformten Bauteilen mit großer Objektvielfalt für automatisierte Pick & Place-Anwendungen. Auch für einfache Teile mit hoher Sortenvielfalt einsetzbar.
Das könnte Sie auch interessieren:
- Keine händische Vororientierung und Ausrichtung der Bauteile notwendig
- Automatischer Einlern-Prozess reduziert massiv den Zeitaufwand sowie manuelle Fehler
- „Teachen“ von beliebigen 3D-Datensätzen für unterschiedlichste Anwendungsfälle
- Roboter kalibrierbares Greifer-Tool für kleine Bauteile (gekröpfter Sauger)
- Flexibel an kundenspezifische Greifer-Geometrien anpassbar
Merkmale
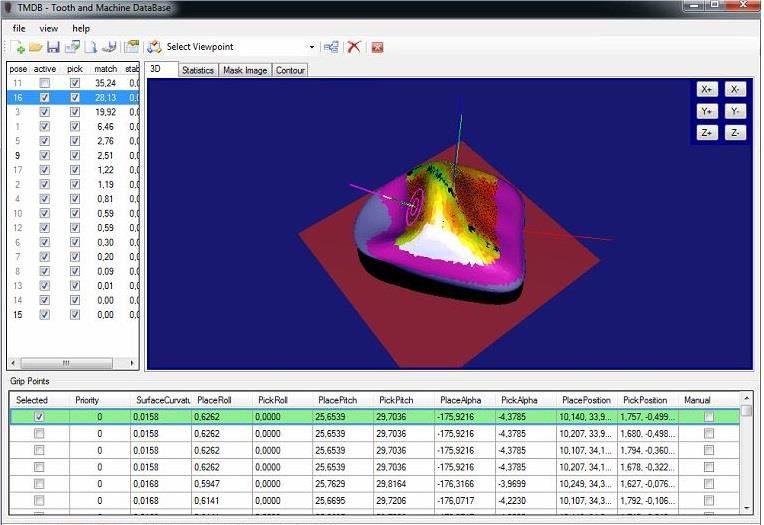
Vollautomatische Vorberechnung der möglichen stabilen Lagen mit Griffpositionen auf Basis der CAD-Geometrie
Manuelle Optimierung bei Bedarf möglich durch Selektion alternativer Griffpositionen
Aus den Pick & Place Positioniersystemen rückfließende Statistiken zu Lage, Auftrittswahrscheinlichkeit und Pick & Place Qualität
REFERENZPROJEKT
TMM© – Tooth Mounting Machine
(European patent No 2925254 and Brazilian patent NoBR 11 2015 012500 0)
Manipulation von Prothesenzähnen
Hunderte verschieden geformte Zahnmodelle mit einer Vielzahl stabiler Lagen werden mit einer Taktzeit von bis zu kleiner 2 Sekunden lagerichtig in eine Gegenform abgelegt.
Wir sind bereit für Ihr Projekt!
Auch wenn Sie keine Zähne produzieren!
Welche komplexe Challenge dürfen wir für Sie mit der Software-Lizenz für Gripplanning realisieren?
Kontaktieren Sie gleich Harald Unterrainer.
Das könnte Sie auch interessieren:

Häufig gestellte Fragen (FAQs)
Gripplanning – was ist das und wie wird es eingesetzt?
Systeme zur Lageerkennung von Teilen in Roboteranlagen, sind essenziell um Prozesse zu automatisieren.
Gripplanning ist ein System zur automatisierten Lageberechnung und Berechnung von Griffpunkten für Manipulationsaufgaben mittels Roboter. Es ist keine händische Vororientierung und Ausrichtung der Bauteile notwendig. Ein automatischer Einlern-Prozess reduziert massiv den Zeitaufwand sowie manuelle Fehler.
Funktioniert Gripplanning bei großer Teilevielfalt mit komplex-/organisch-/frei-geformten Teilen?
Ja! Wenn es in Ihrer Produktion eine sehr hohe Bauteilevielfalt von komplex-/ organisch-/frei-geformten Teilen gibt, ist ein „manuelles Anlernen“ oftmals nicht effizient. Wir haben die richtige Automatisierungslösung im Bereich Pick & Place für Sie, mit der Sie automatisiert Teile einlernen, im Weiteren sortieren und mit Pick & Place bewegen können. Die WESTCAM–Gripplanning© Software unterstützt diese Prozesse.
Ihr Unternehmen hat bereits Greifroboter im Einsatz – Sie möchten sich über die Vorteile von Gripplanning informieren?
Jederzeit gerne! Wir stehen Ihnen für eine kostenloses Beratungsgespräch zur Verfügung. Kontaktieren Sie uns doch gleich. Wir freuen uns auf Sie!
